基恩士PLC②--3轴伺服实例解析笔记
1.0工具--CPU定位参数设定
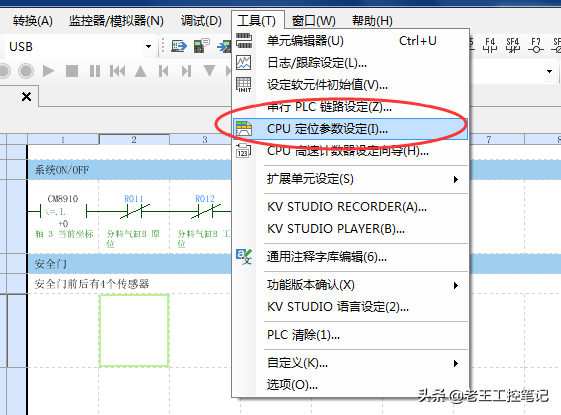
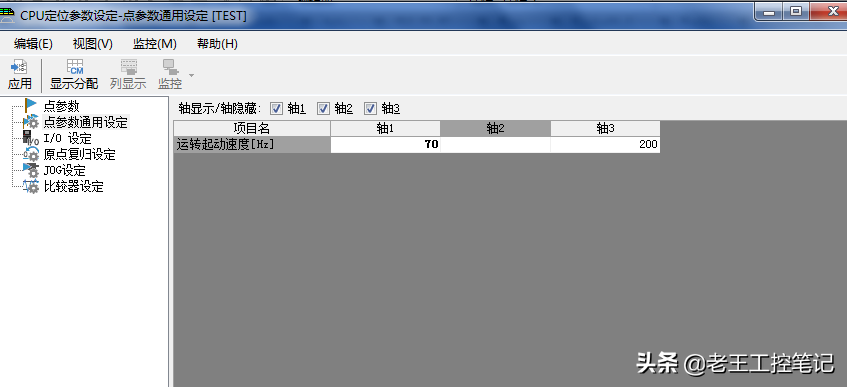
1.1点参数通用设定
这里是设定运行启动速度,默认是200,可以设置成70慢一点,只要低于运行速度就行
1.2I/O设定
里面有原点传感器,输入时可选的比如轴1,输入可以直接设置R000输入点,也可以设置成CR8014(轴2为8114,轴3为8214),他们的区别就在于,通过CR8014可以在程序中灵活配置原点传感器
停止传感器也是一样,如上所述,不过他的输入点分别为CR8015,CR8115,CR8215

Z相,限位开关CW,限位开关CCW,这三个输入都是不能设置的
选择输出模式:有两种一种是常用的单脉冲模式,方向+脉冲,还有一种双脉冲模式,+-脉冲模式
正方向动作时输出脉冲:正转脉冲
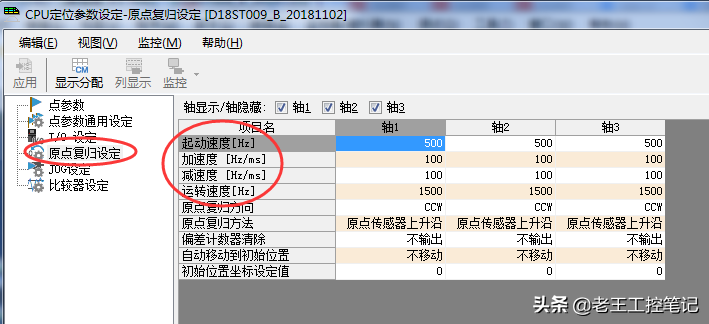
1.3原点复归设定
一般的话,参数稍微改下就可以,比如启动速度,默认200,可以改到500,加减速度模式10可以改成100,运转速度默认1000可以改成1500,还有原点复归方向可以根据轴摆放的位置设定,
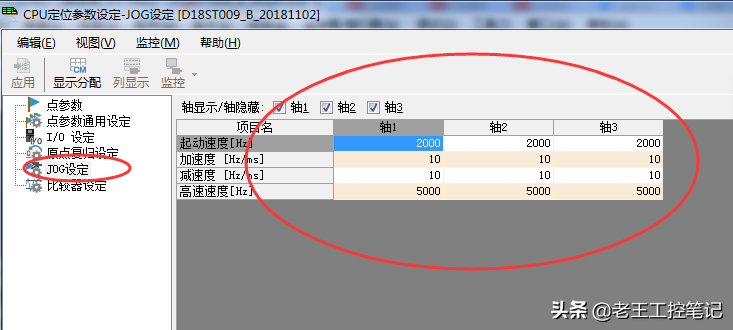
1.4JOG设定
手动JOG简单设置下启动速度从默认500改到2000,其他根据情况修改
比较器一般不用就不用设定
1.5点参数
一共可以设置20个轴点位
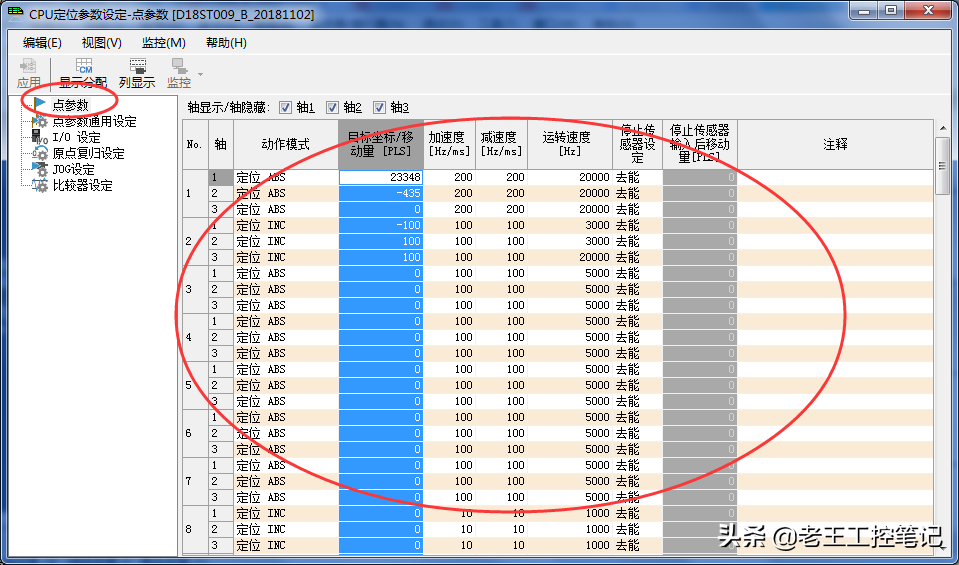
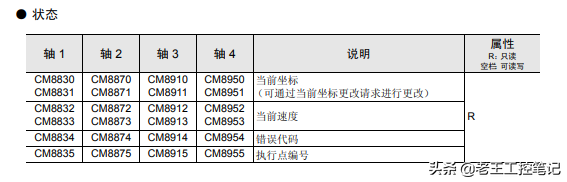
可以读取的点位相关参数(当前坐标,当前速度等)
具体定位点的参数表如下

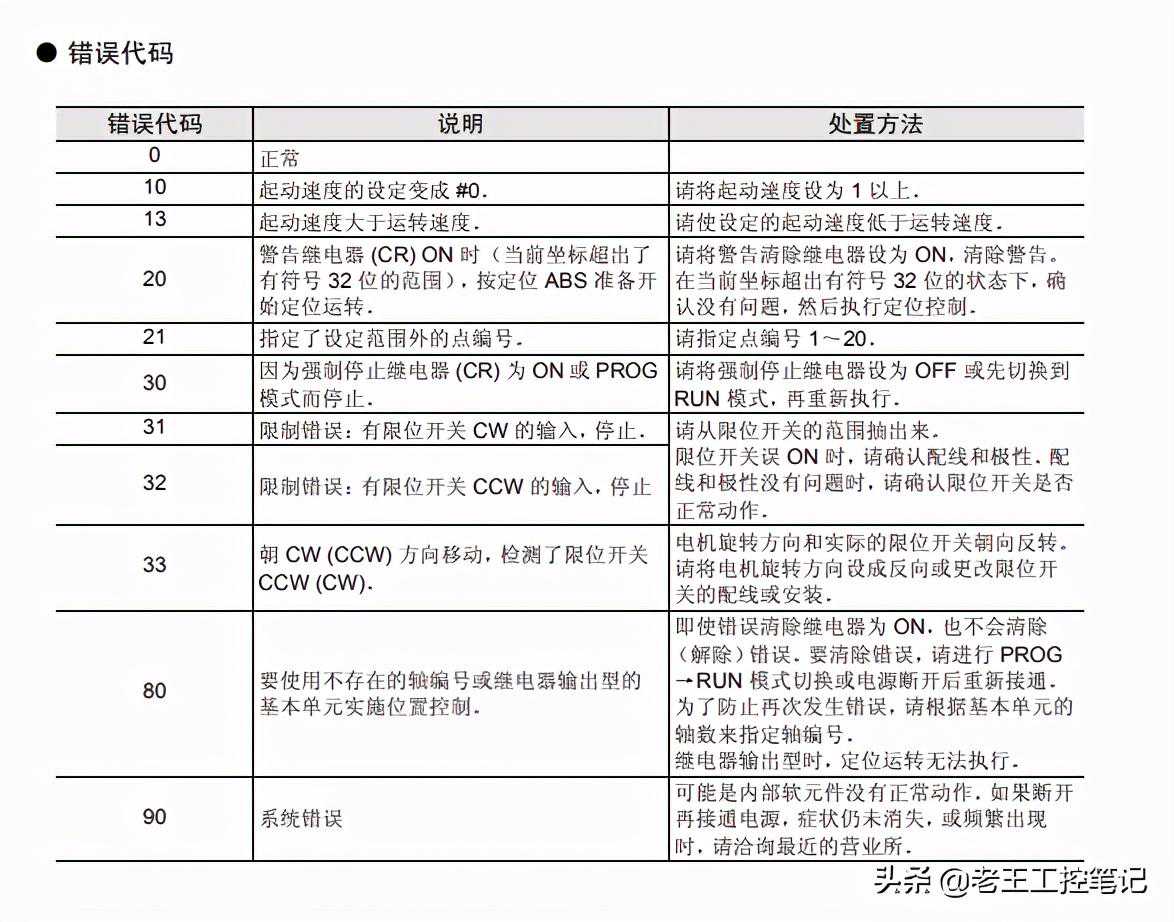
可能出现的错误代码如下
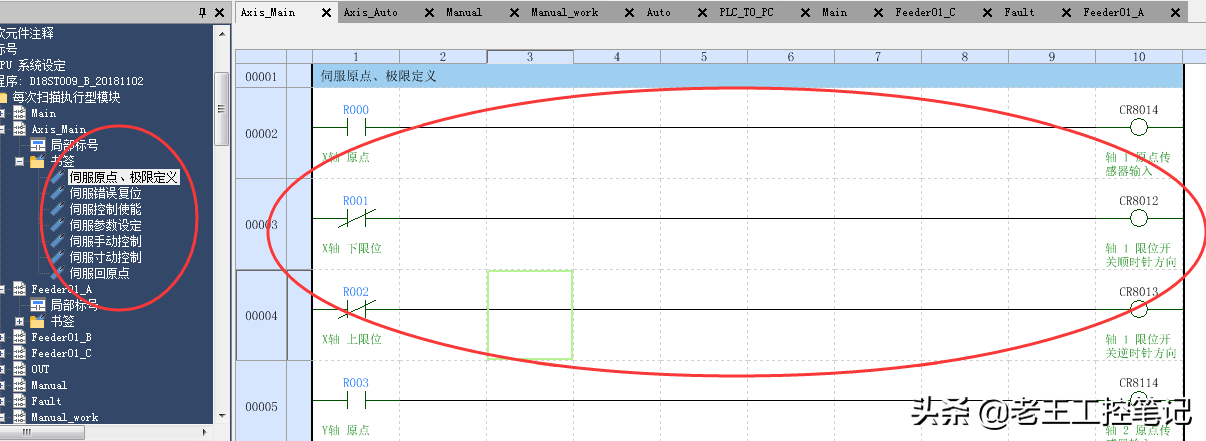
2.0当如上设置好参数后,进行程序的编写
2.1设置原点上下极限传感器
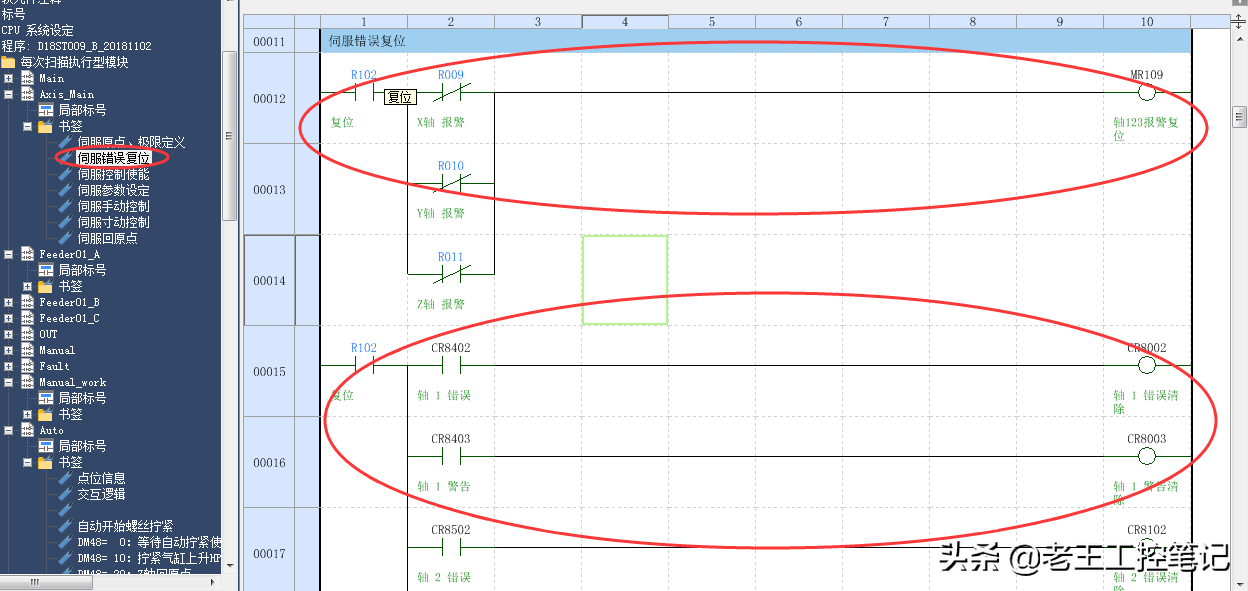
2.2伺服错误复位
复位按下后,复位伺服的报警,错误,警告
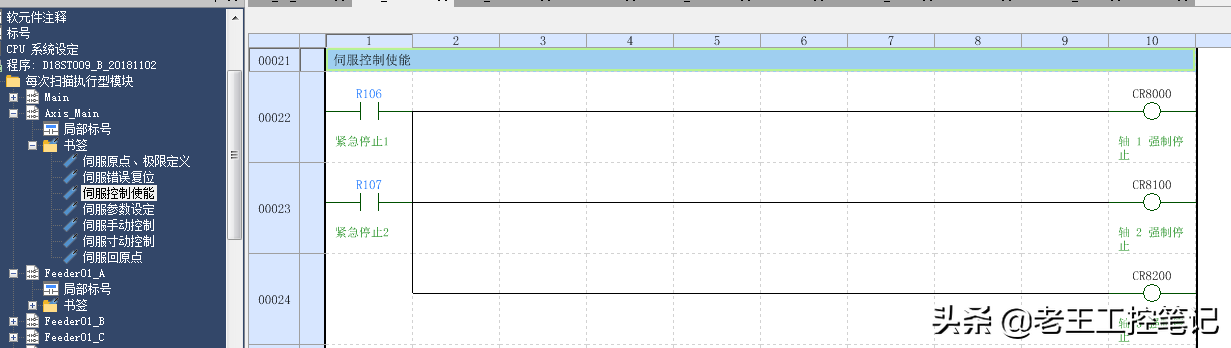
2.3伺服使能控制
首先如果有急停的话,就驱动伺服的强制停止,轴1-CR8000,轴2-CR8100,轴3-CR8200
如果轴出现报警,错误,警告,自动复位,各轴回原点,移动等标志位,并且通知伺服电缸减速停止

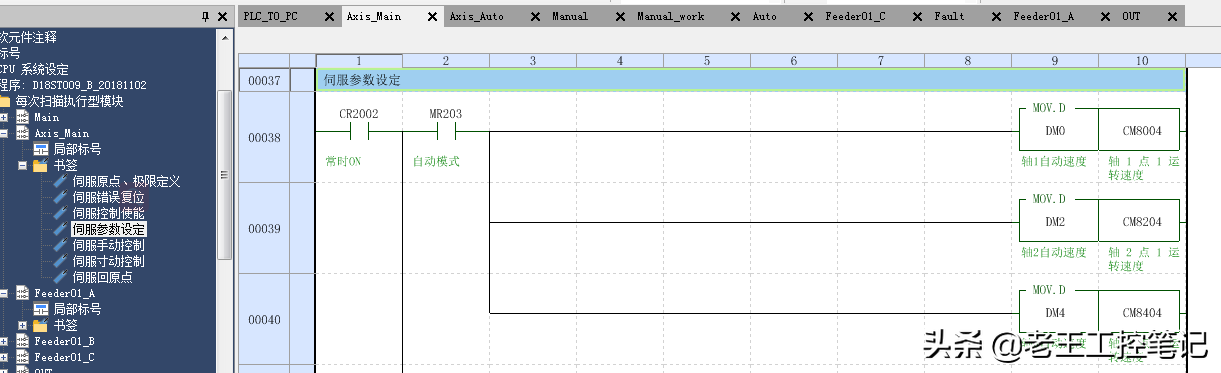
2.4伺服参数设置
自动模式参数设置,主要就是各轴的自动速度
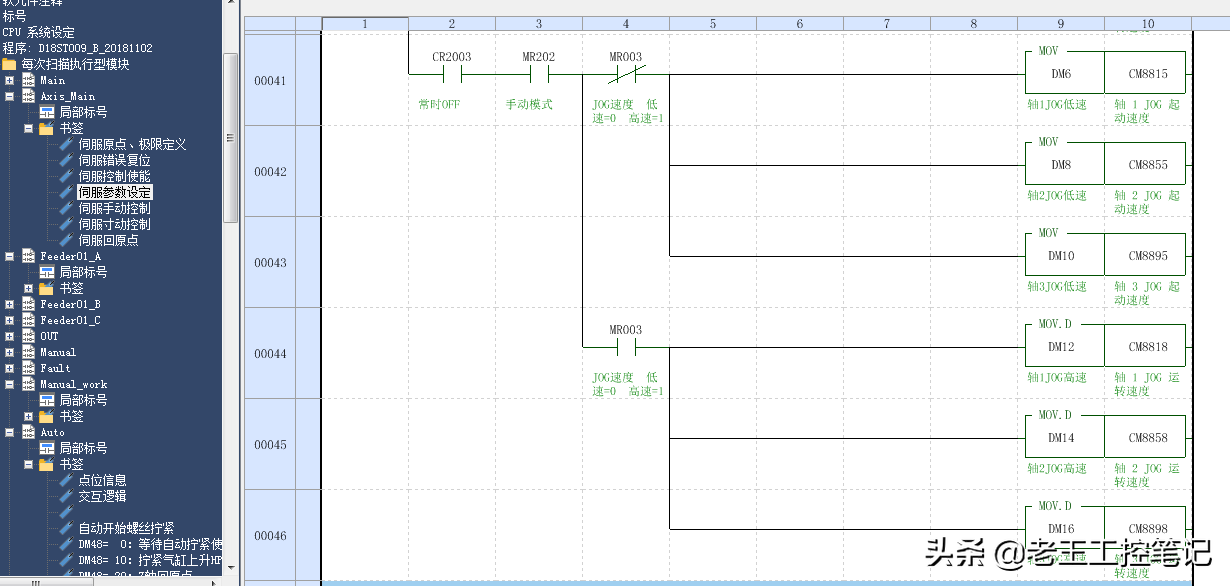
手动模式参数设置,主要是jog的速度,一般分高速跟低速,所以有2种速度设定切换,这里的高速低速是直接写到系统内的,后面用jog速度直接可以切换
2.5伺服手动控制
手动模式下控制伺服,首先要考虑一些干涉情况,比如在这里拧紧气缸必须在原位,Z向轴3的位置应该在0以上,轴3应该回过原点,这种情况下才能手动
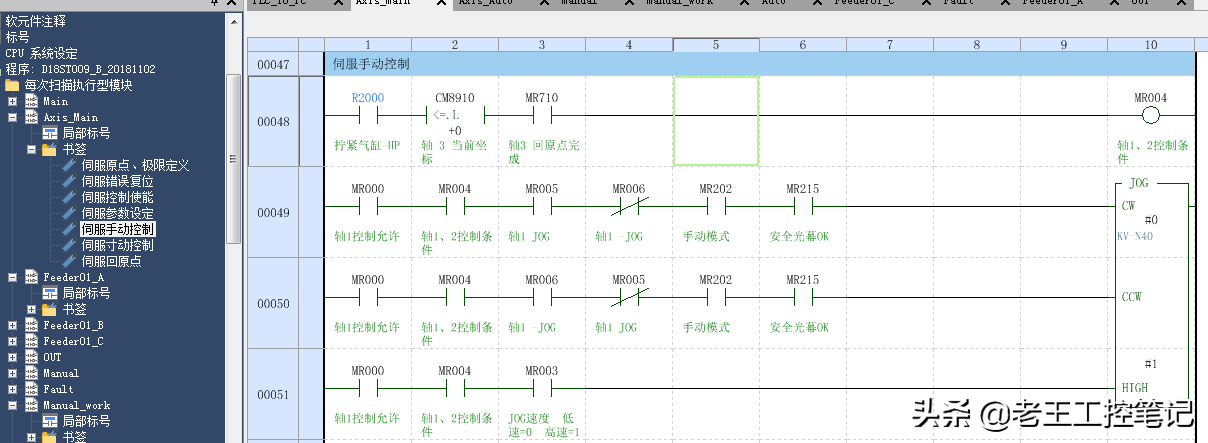
总结说手动的条件,①伺服轴无报警,警告,错误②不存在干涉风险的条件③安全光幕无遮挡④手动模式⑤手动jog按下⑥jog速度设置。jog指令里面的high参数,当给0时默认低速,当给1是为高速Jog
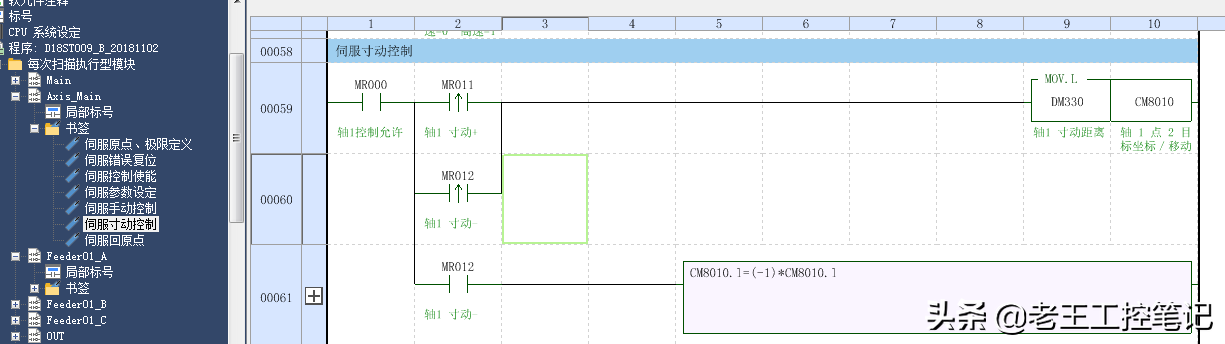
2.6伺服寸动
伺服寸动的逻辑跟自动跑位置是一样的,首先给一个寸动距离和方向,当寸动正方向就给一个正,否则相反,如下图,基恩士的负方向是=(-1)*,其中cm8010指的轴1的单元轴1的原点复归,等到定位完成原点复归完成信号
免责声明:本文章如果文章侵权,请联系我们处理,本站仅提供信息存储空间服务如因作品内容、版权和其他问题请于本站联系