PID控制系统在工程应用中用的比较多,它是一个闭环控制回路,他的控制原理是通过控制器里的比例(P),积分(I)和微分(D)的加权输出使得系统输出越来越小而接近设定值,达到按设定值运行的目的。PID通过控制控制比例,积分,微分三种不同方法组合使得系统能够有效的精确控制。下面通过向导编程方法举例说明:

弹出的向导里如下图操作:
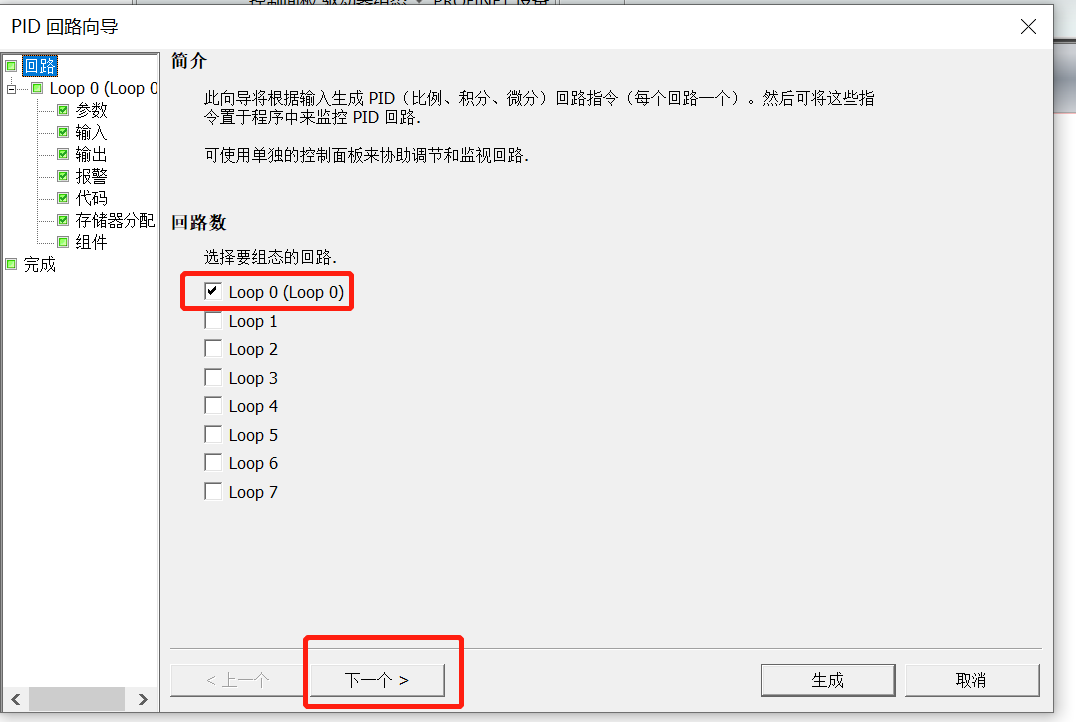
选择第一个回路
回路命名
参数设定
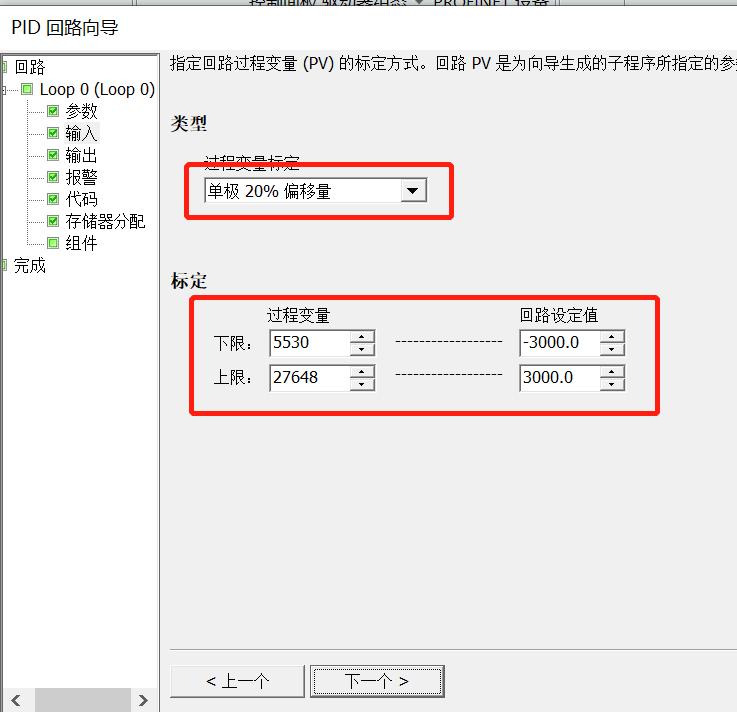
设定仪表变量输入和输出设定:
参数输入设定

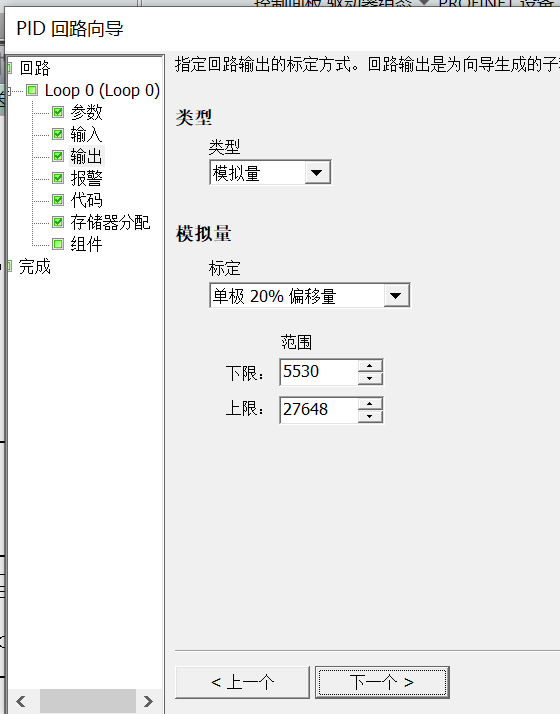
参数输出设定
报警设定:
报警设定
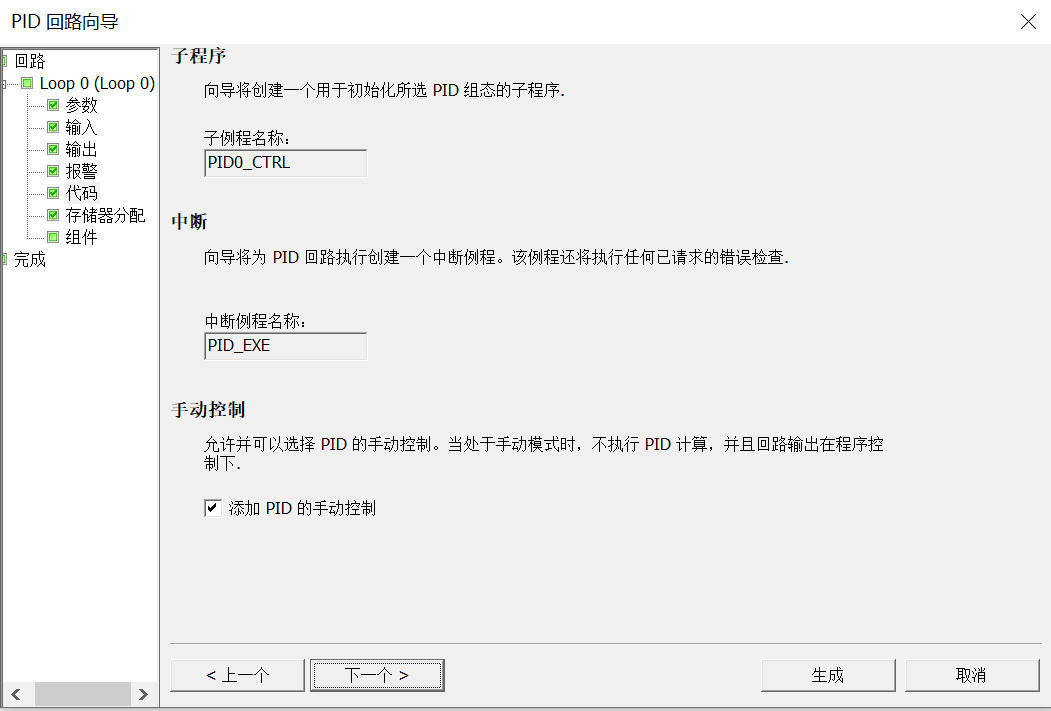
生成程序代码
代码生成
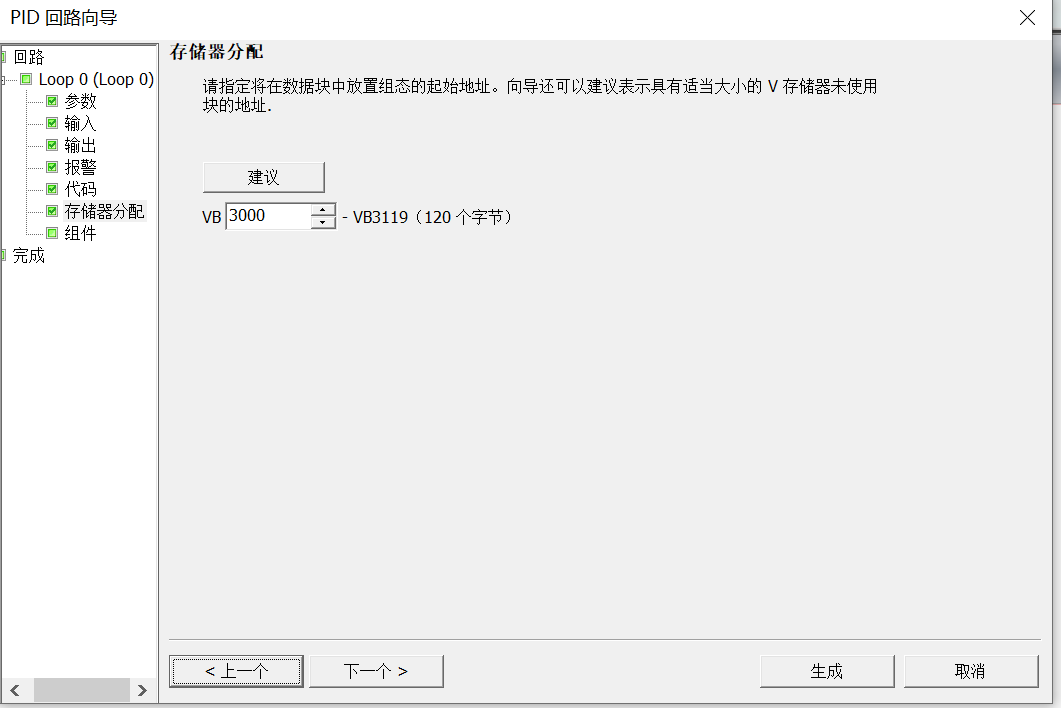
分配存储地址
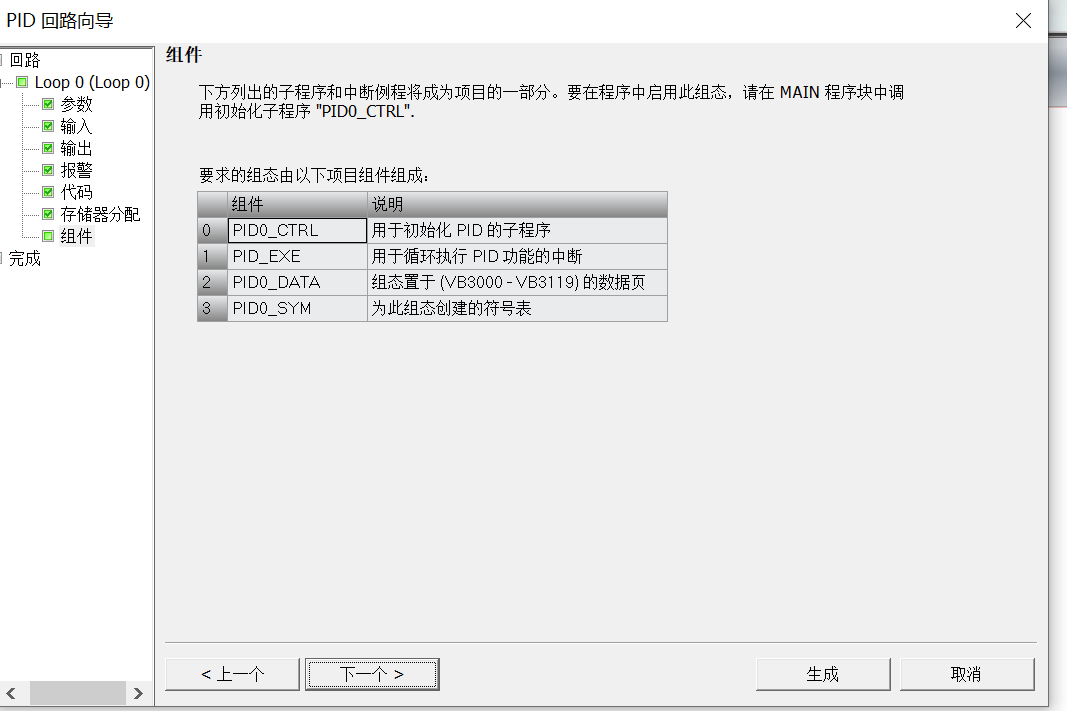
程序组件

生成后在调用子程序中选择PID子程序:
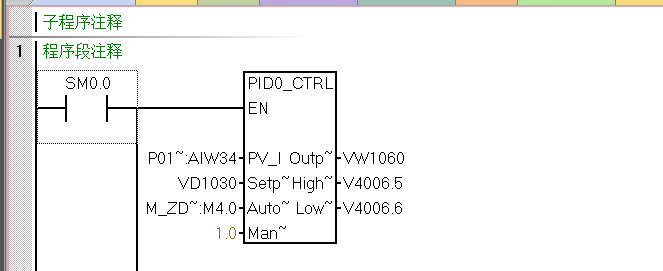
PID子程序编辑

程序
下载后监控程序,打开PID控制面板可以看出仪表输入实时为81.65设定值为100所以输出值为最大。
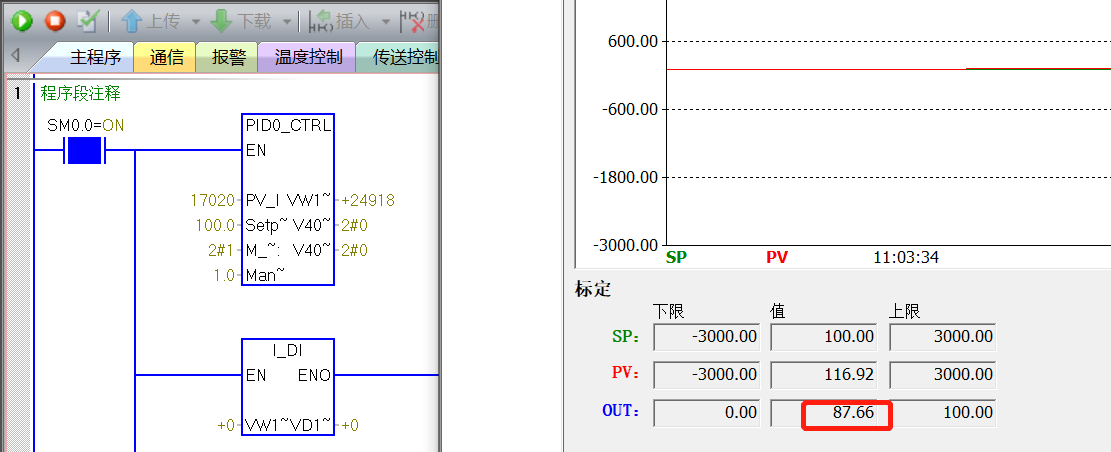
控制面板在线监控修改
当外部实时数据增大超过设定值时输出开始降低一直到稳定为止,如图:
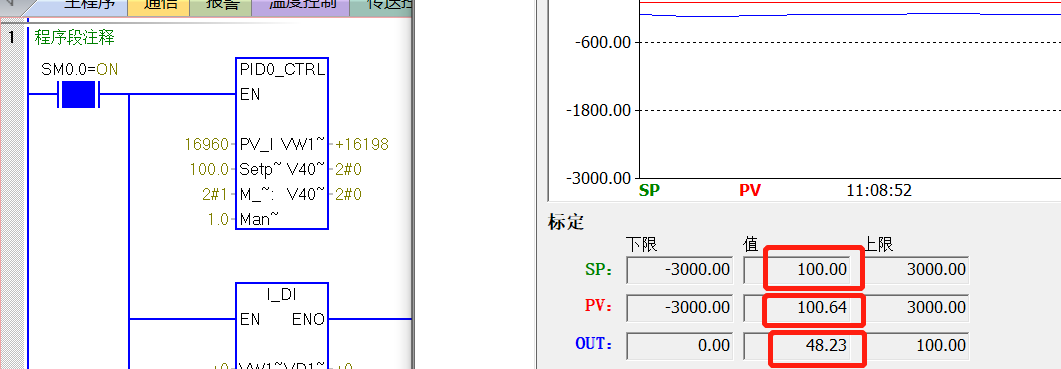
PID调节
PID调节稳定
免责声明:本文章如果文章侵权,请联系我们处理,本站仅提供信息存储空间服务如因作品内容、版权和其他问题请于本站联系