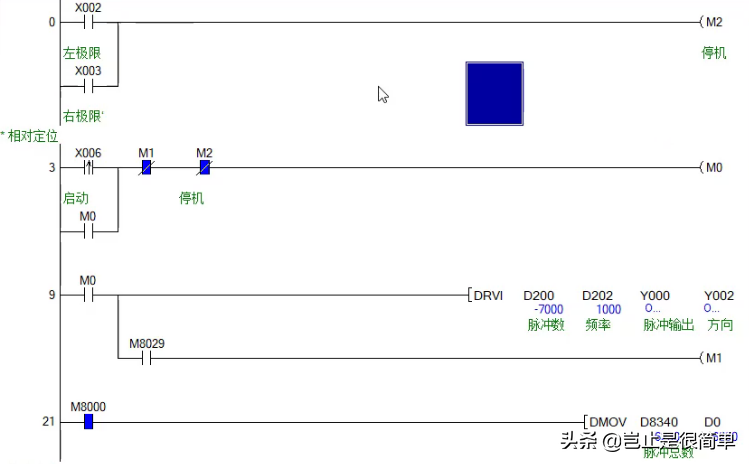
相对定位
定位指令:
1、DRVI—相对定位指令
DRVID200D202Y0Y2—按下X6启动后,Y0后发出以D202为频率,D200位脉冲数(D200为正值正脉冲,正转;D200为负值负脉冲,反转;)的脉冲;Y2用以控制脉冲的方向;D8340为记录的相对于程序原点(即D8340为零)的脉冲数;每当按下X6启动按钮后以当前位置为起点做相对于当前位置的相对运动。
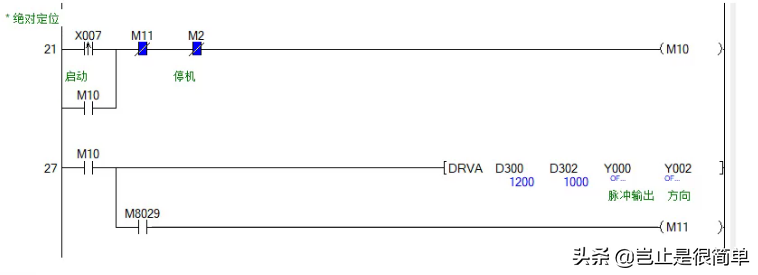
绝对定位
2、DRVA—绝对定位指令
DRVAD300D302Y0Y2—按下X7启动后,Y0后发出以D302为频率,D300位脉冲数(D300为正值正脉冲,正转,在离原点为D300的脉冲数位置停下;D300为负值负脉冲,反转,在离原点为D300的脉冲数位置停下;)的脉冲;Y2用以控制脉冲的方向;D8340为记录的相对于程序原点(即D8340为零)的脉冲数;当按下X7启动按钮后以程序原点位置为参考做相对于程序原点位置的绝对运动,到达位置后再按下按钮不在运动。
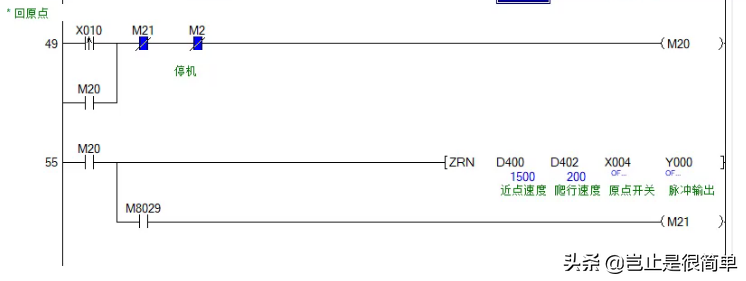
回原点
3、ZRN—回原点指令
ZRND400D402X4Y0—按下X10启动后,Y0后发出以D400为频率的回归速度(通常较快),到达X4原点开关位置,变为以D402为频率的爬行速度(通常较慢)到刚好离开X4的位置后停下为机械原点和程序原点重合;D8340为记录的为机械原点和程序原点(即D8340为零,回零点后D8340的值自动清零);每次在回归之前需要将滑台手动移到回原点的反方向去。
免责声明:本文章如果文章侵权,请联系我们处理,本站仅提供信息存储空间服务如因作品内容、版权和其他问题请于本站联系