陈超
秦皇岛港股份有限公司第二港务分公司秦皇岛066003
摘要:介绍一种根据翻车机接卸工艺特点、利用逻辑运算(不依靠检测)实现的翻车机重车空车识别系统,经实际应用该系统能够可靠识别翻车机转子内的空车重车,给操作人员明确指示,有效杜绝了生产事故的发生。
关键词:翻车机;空车重车识别;工艺;PLC编程
中图分类号:TH237+.3文献标识码:B文章编号:1001-0785(2018)11-0107-03
1设计背景
在港口翻车机的卸车作业过程中有时会遇到特殊情况,如“反位车钩”需要摘钩解列作业、个别限位故障导致自动循环中断、机械液压故障导致自动循环中断等,这些情况都需要在自动作业过程中临时终止自动循环加入手动操作,而手动操作后系统恢复自动循环时,操作司机有可能会忘记翻车机转子内是否为重车,出现将重车推出的情况,虽然翻车机出口有专人检查,但此时必须手动将重车重新牵回至翻车机转子内,严重影响作业效率。另外如果推出重车未及时发现将造成生产质量事故,严重影响客户对港方的信任,出现客户流失的严重后果。
2系统设计
2.1总体思路
秦皇岛港煤二期翻车机卸车工艺为:由定位车的主臂(正常情况)或辅臂(翻车机转子外重车少于或等于3节时使用辅臂)将翻车机转子左侧重车牵入翻车机,每循环牵入翻车机车皮2节(正常情况下)或1节(尾车剩1节时),牵入后翻车机自动卸车,然后自动执行下一循环。由于不再添加其他检测限位和检测装置,只能重新审视接卸工艺,根据现有接卸工艺的特点设计翻车机重车空车识别程序,当系统中现有的进车检测程序检测到车皮后,此时车皮即在接卸区域内,如图1所示,定位车伸出主臂(辅臂)扣钩后即可牵引重车,当定位车向前行走,即将重车牵引入翻车机转子内。据此,可以认为车皮在接卸区域内时,定位车主臂(辅臂)伸出向前行走一定距离后翻车机转子内即为重车。由于C80、C76单节车皮长度都大于10m,于是把这个距离设定为10m,即当定位车主臂(辅臂)伸出向前行走内监视屏上即显示翻车机内为重车,此时判定重车程序自锁,只有翻车机倾翻至最大角度才解除锁定,解锁后监视屏上显示翻车机内为空车。同时,在自动作业程序中添加限制条件,当自动作业中定位车牵入2节或1节车后,终止自动循环中下一循环开始程序,当为空车后,方可进入下一循环,开始继续迁入重车。
2.2具体设计方案
该重车空车识别系统的设计基础为秦皇岛港煤二期2套翻车机现有控制系统,使用施耐德ModiconQuantum系列PLC,在软件下使用984LL逻辑梯形图进行编程,使用ifix组态软件作为上位界面设计软件。
在现有控制系统中选取4个没有使用过的寄存器402960、402961、402962、402963,分别定义402960存放定位车主臂伸出时启动位置数值、402961存放定位车主臂伸出时向前行走距离数值、402962存放定位车辅臂伸出时启动位置数值、402963存放定位车辅臂伸出时向前行走距离数值。如图2所示,000257为定位车行走运行信号,当定位车停止行走时利用SU16(16进制减法)模块分别对402960、402961、402962、402963四个寄存器进行清零,为下次定位车行走时的距离计算做好准备。

图1总体思路说明示意图
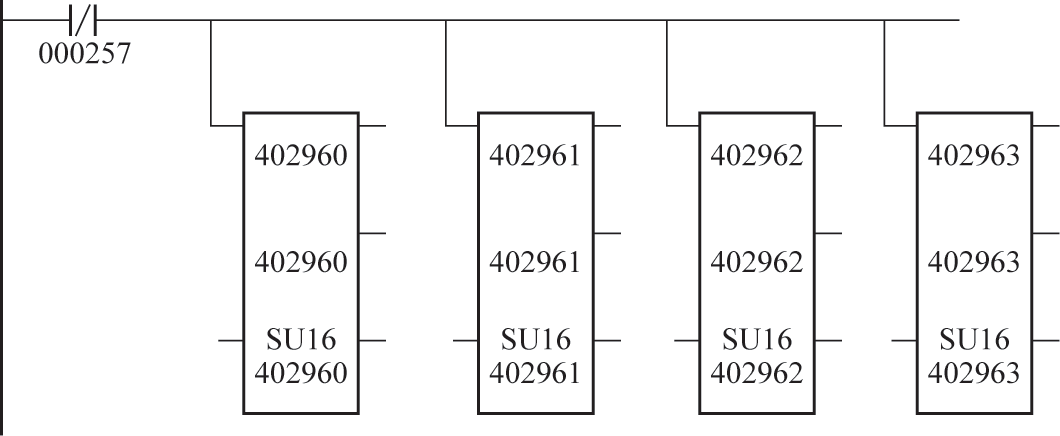
图2清空寄存器程序图
当定位车主臂伸出时,在定位车行走启动瞬间将定位车的位置数据写入寄存器402960。如图3所示,100345为定位车主臂伸出扣钩检测限位,寄存器401616内的数值为定位车位置数据,利用AD16(16进制加法)模块将定位车启动瞬间的位置数据写入寄存器402960,之后,在主臂伸出行走过程中计算定位车行走距离,即将寄存器401616中的数值减去寄存器402960的数值,并将计算的差值存入寄存器402961中。
当寄存器402961中的数值≥10000时,即定位车行走距离≥10m时,向系统输出行走距离达到10m判定信号,如图4所示,TEST模块为数值比较运算模块,其比较寄存器402961中的数值,当寄存器402961中的数值≥10000时,下面两根输出线输出信号,000269是定位车反向行走信号点,反向行走时不输出判定信号,判定输出信号使用002270作为标志位。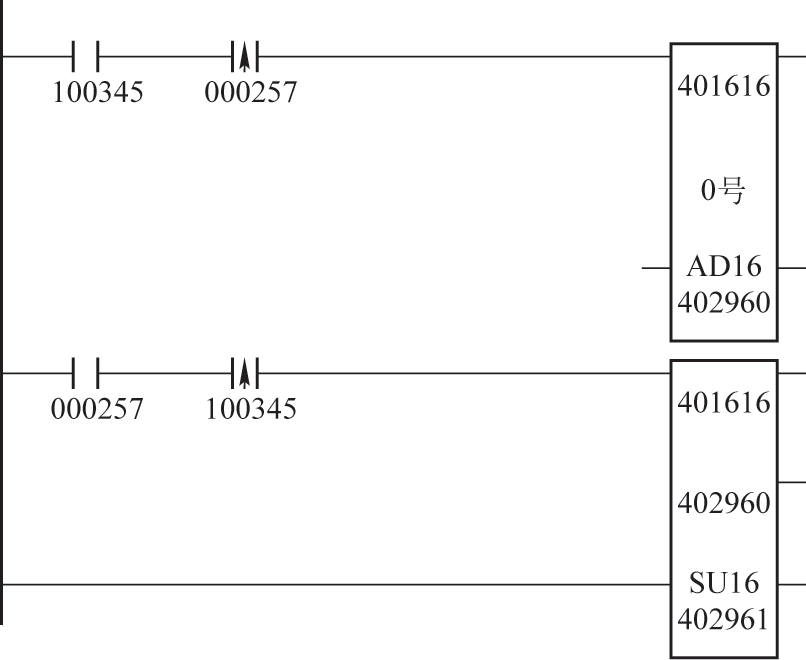
图3计算定位车主臂伸出时向前行走距离程序图
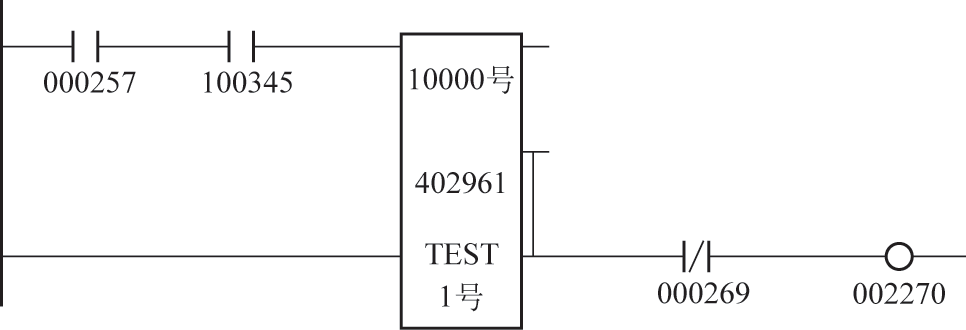
图4定位车主臂伸出行走距离判断程序图
辅臂伸出时距离判定方式和主臂伸出时完全相同,如图5所示,图中100341为辅臂伸出检测开关信号,判定输出信号使用002271作为标志位。
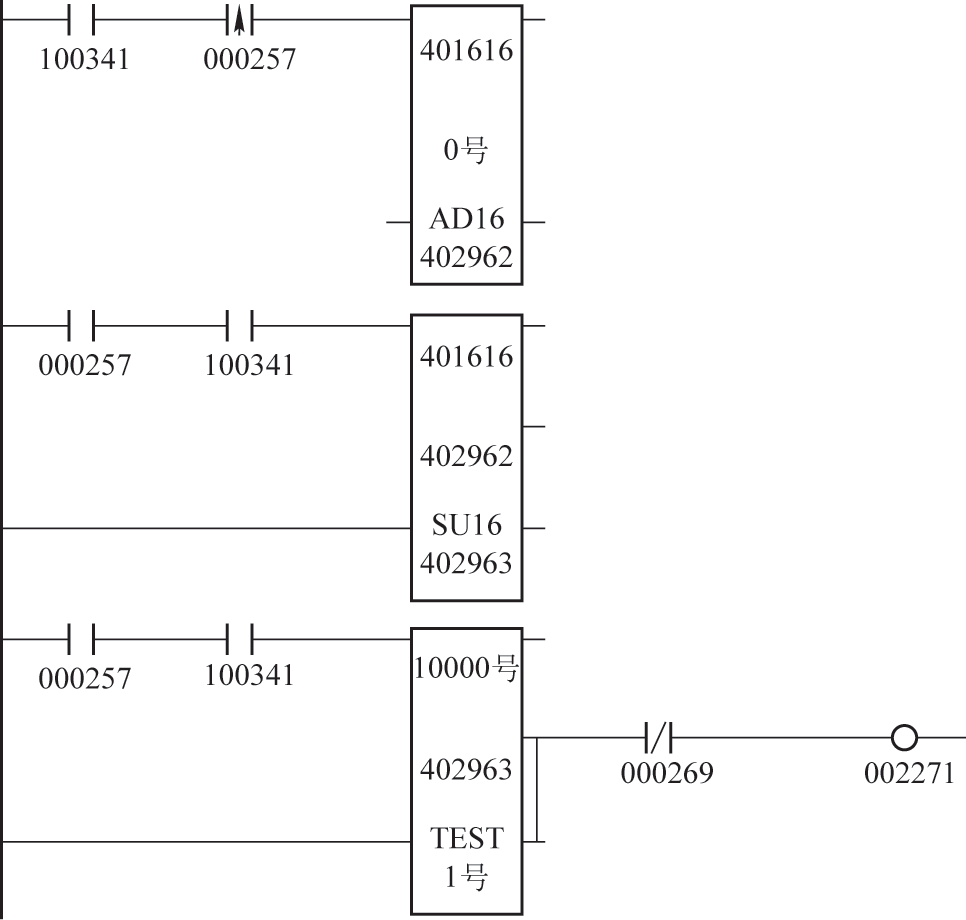
图5定位车辅臂伸出时行走距离判定程序图
如图6所示,上半部分是判断翻车机转子内是重车还是空车程序,001360为1时表示车皮在接卸区域内,001419为1时表示翻车机倾翻到最大角度,其输出的002231既是下部分的循环自动启动禁止信号的触发信号,又是上位监控画面的空重车提示信号。
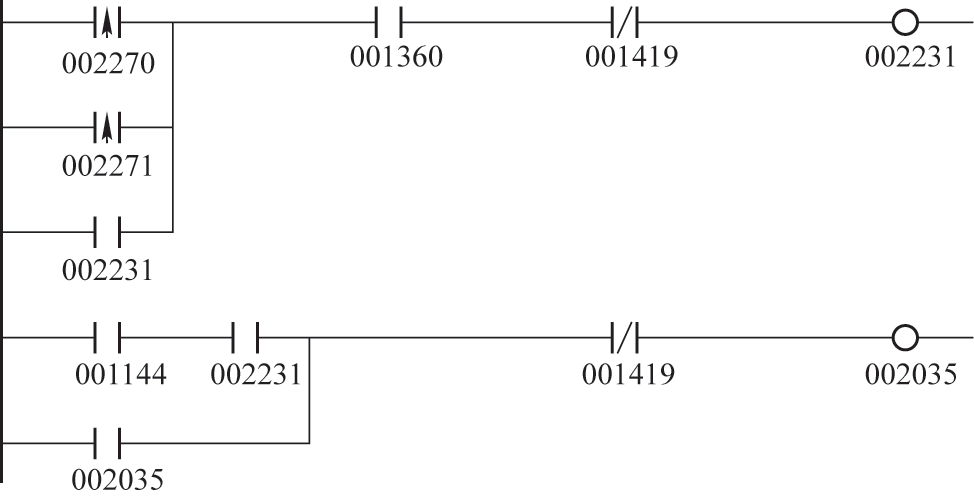
图6重车空车判定程序图
如图7所示,当002231为1时上位界面显示红底“翻车机内重车”标志,当002231为0时上位界面显示蓝底“翻车机内空车”标志。图6下半部分程序中,001144为1时为前行停止,即在前行停止且翻车机内为重车时向系统给出循环自动启动停止信号。

图7上位监视屏画面设计图
如图8所示,在原有程序的基础上添加了002230点,使表示车皮在接卸区域内状态的001360信号不受手动操作影响,图中点001008为手动操作状态点,点100075为出口西侧空车车皮检测信号,当出口有空车时,由于是不解列作业,即认为车皮在接卸区域内,手动不会复位001360,且考虑车皮间钩裆会引起点100075中断,因此还添加了延时断程序,延时10s断开002230点,避开车皮运动时002230点断开使手动作业时001360复位。
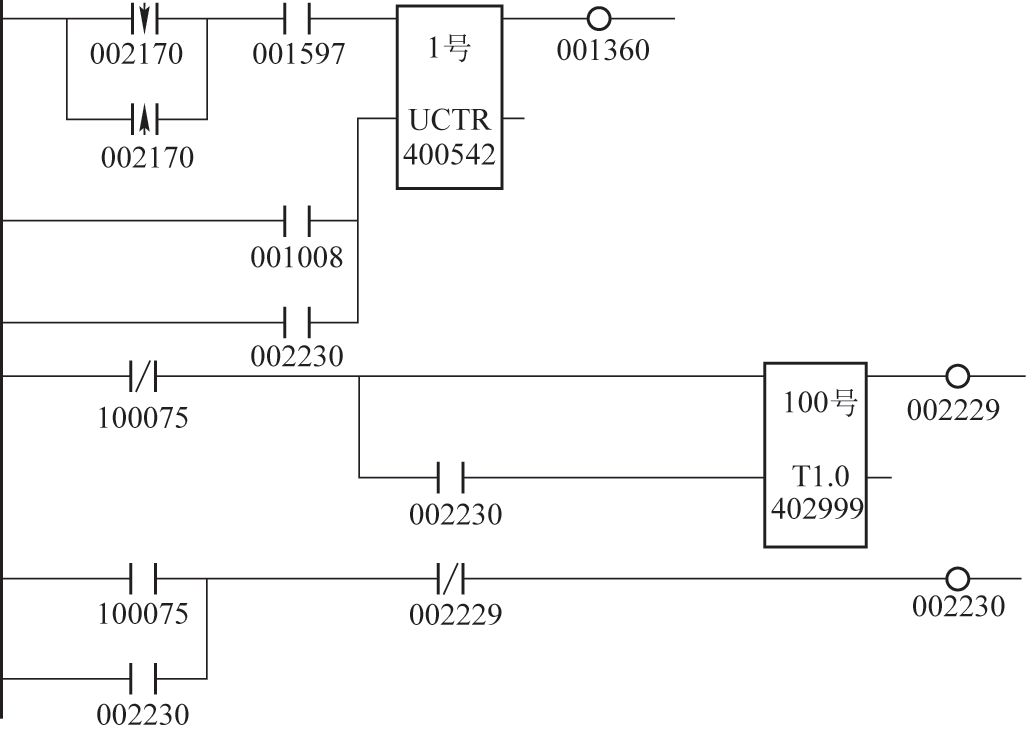
图8识别车皮在接卸区域内程序图
如图9所示,将循环自动启动停止信号002035及翻车机内重车信号002231分别加入自动作业下一循环启动程序中,在各种情况下禁止自动作业下一循环启动,在程序上禁止此时定位车将重车推出。
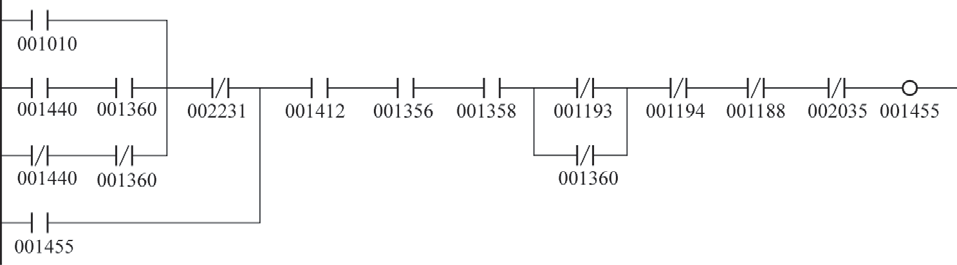
图9自动作业下一循环启动程序图
3实施效果
翻车机重车空车识别系统在秦皇岛港煤二期投入使用后,杜绝了因特殊情况在恢复自动循环作业后将重车推出的情况,且方便操作司机了解翻车机内重车空车情况,避免了卸车事故的发生。
参考文献
[1]代晓雪.黄骅港三期工程拨车控制系统[J].起重运输机械,2016(8):100-104.
[2]谢芳.翻车机系统选型[J].起重运输机械,2016(9):5-8.
免责声明:本文章如果文章侵权,请联系我们处理,本站仅提供信息存储空间服务如因作品内容、版权和其他问题请于本站联系