一套投运的系统,采用了PI调节,始终效果不佳,主要原因在于测量环节滞后大,调节阀精度又不好,于是用户想试试微分作用。
说实话,到现在为止我都没在实战中用过微分调节,于是老老实实的去网上找资料做做功课。
简单小结一下:
1、微分作用是根据偏差的变化率进行计算调节,等于是预测误差的变化,提前做出预判动作
2、微分时间越大,作用越强
3、根据经验值进行设定时,可以按照积分时间的1/4-1/2进行初始设置
然后我在step7里面看了一下FB41的说明,发现原来微分作用默认是不开启的(比例和积分作用是默认开启的),而且除了微分时间参数以外,还有一个微分滞后时间参数:
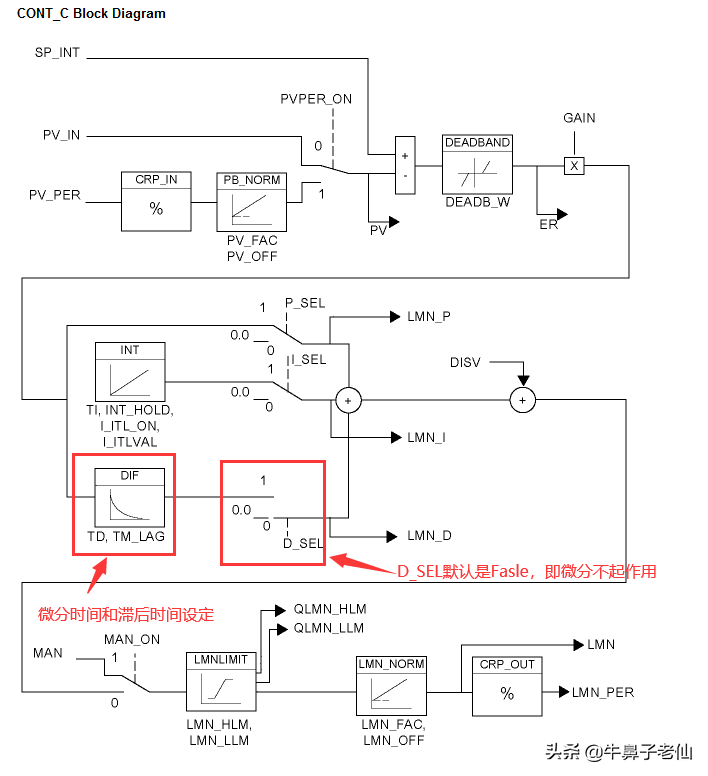

不由得对这个TM_LAG参数好奇了,但是去西门子官网查了半天,包括论坛里面关于PID的精华讨论贴也没看到有人提及微分作用的设置问题,只能自己动手做试验看看了。
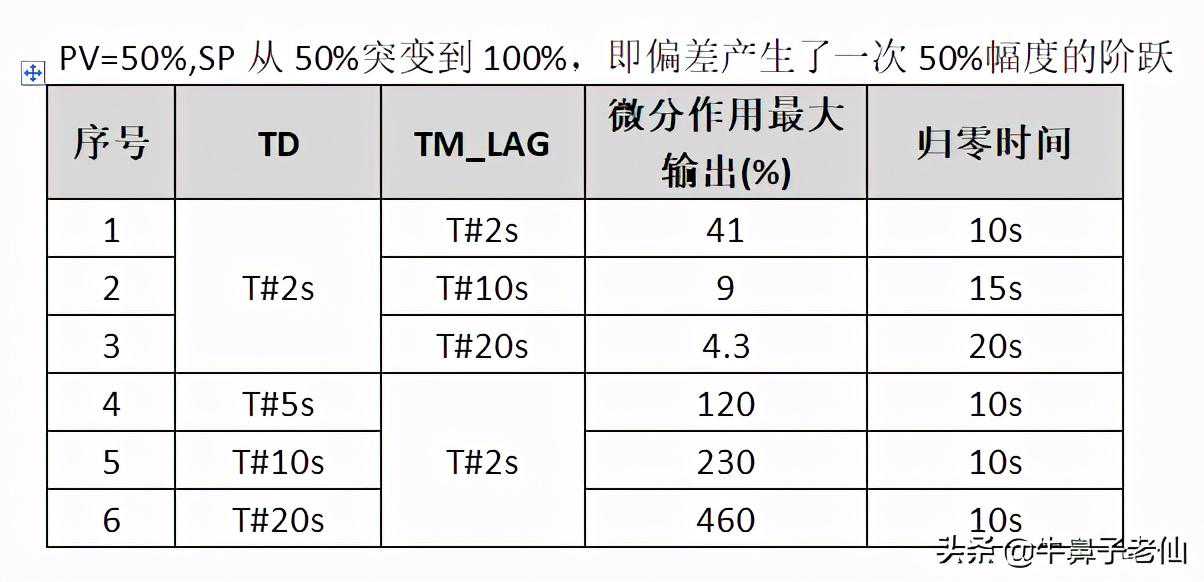
还好发现FB41居然有三个输出管脚,分别只是P\I\D作用的数值,这样可以观察微分作用的具体变化,下表是我肉眼观察的大致结果:
免责声明:本文章如果文章侵权,请联系我们处理,本站仅提供信息存储空间服务如因作品内容、版权和其他问题请于本站联系