执行初始化运行(BCO运行):KUKA机器人的初始化运行称为BCO运行.(BCO是Blockcoincidence(即程序段重合)的缩写,重合意为”一致”及”时间/空间事件的会合”)
在下列情况下要进行BCO运行:
l选择程序
l程序复位
l程序执行时手动移动
l更改程序
l语句行选择
BCO运行的原因:为了使当前的机器人位置与机器人程序中的当前点位置保持一致,必须执行BCO运行.
仅当当前的机器人位置与编程设定的位置相同时才可进行轨迹规划.因此,首先必须将TCP置于轨迹上.
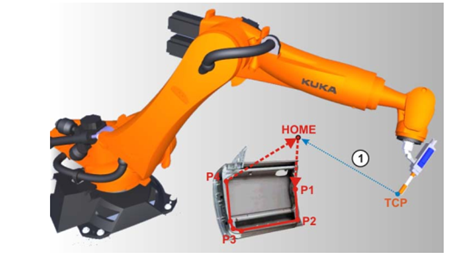
在选择或者复位程序后BCO运行至Home位置
选择和启动机器人程序
如果要执行一个机器人程序,则必须事先将其选中.机器人程序在导航器中的用户界面上选择.通常,在文件夹中创建移动程序.Cell程序(由PLC控制机器人的管理程序)始终在文件夹”R1”中
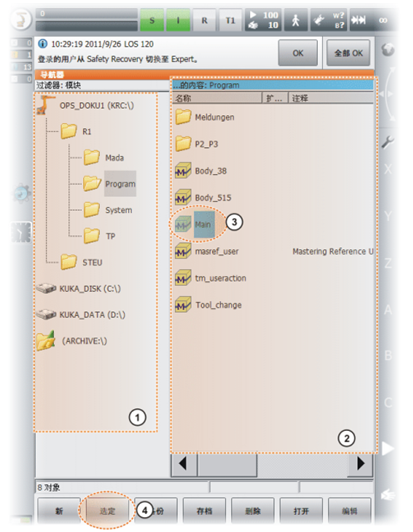
1.导航器:文件夹/硬盘结构
2.导航器:文件夹/数据结构
3.选中的程序
4.用于选择程序的按键
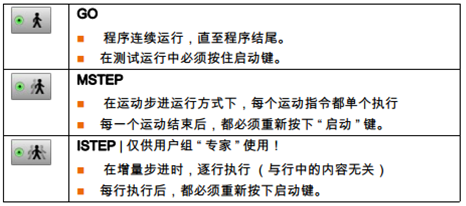
对于程序启动,有正向运行程序按键和启动反向运行程序按键

如果运行某个程序,,则对于编程控制的机器人运动,可提供多种程序运行方式:
机器人程序看起来是怎样的?
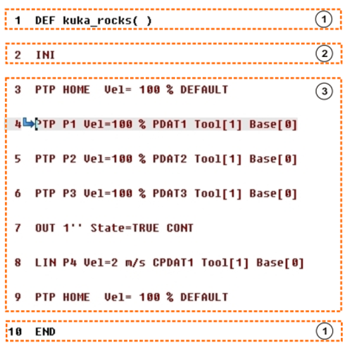
1.”DEF程序名()”始终出现在程序开头
“END”表示程序结束
2.”INI”行包含程序正确运行所需的标准参数的调用
“INI”行必须最先运行!
自带的程序文本,包括运动指令,等待/逻辑指令等
3.移动指令”PTPHome”常用于程序开头和末尾,因为这是唯一的已知位置.
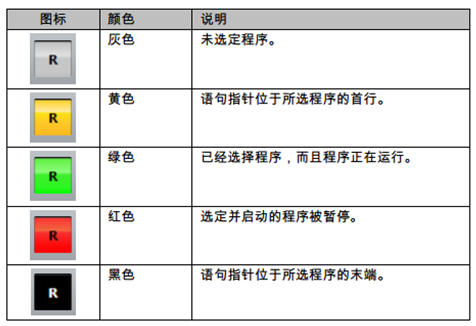
程序状态
启动机器人程序的操作步骤:
1.选择程序
2.设定程序速度(程序倍率)
3.按确认键
4.按下启动键并按住,机器人执行BCO运行.
5.到达目标位置后运动停止.

6.其它流程(根据设定的运行方式)

a)T1和T2:通过按启动键继续执行程序
b)AUT:激活驱动装置
免责声明:本文章如果文章侵权,请联系我们处理,本站仅提供信息存储空间服务如因作品内容、版权和其他问题请于本站联系